本帖最後由 aa00 於 2011-2-14 02:21 PM 編輯 tvb now,tvbnow,bttvb! [: V2 F( V; x" ~5 M9 T$ ~1 P1 k
公仔箱論壇3 B8 h! x# o! B. @7 x' Q
据美国《连线》杂志报道,随着科学技术的快速发展,科学家研制出各种机器人,有超大号的曲棍球机器人、像沙滩汽车或者冰箱具有清洁地面的机器人、勘测火星表面的机器人以及配发啤酒的机器人,但研制像人类行走自如的机器人仍存在一定差距。
?# G* m P" a
6 x0 p5 _% T& r" j美国佛蒙特大学的最新计算机模拟显示,与动物进化十分相似的是,机器人将逐渐进化完善其行走能力。以下是美国《连线》杂志列举的13款在行走特征方面独具优势的机器人:os.tvboxnow.com: w9 R! y* t% l$ ?0 v- L
$ P- C6 D6 R" q. o# Hos.tvboxnow.com
9 g% q4 V5 N) f/ E: zos.tvboxnow.com 公仔箱論壇# j# |' ^5 c( @) V' h; C* S 公仔箱論壇# j# |' ^5 c( @) V' h; C* S
1、步态进化机器人
- ~( Y( \) J {# _ ]& Z) X1、步态进化机器人- g0 r$ h3 r( p; V
tvb now,tvbnow,bttvb: S( @6 M9 d6 D* U
通过计算机模拟,美国佛蒙特大学科学家乔什-邦加德(Josh Bongard)建造一个虚拟机器人,可随着时间改变自己的外形。起初,这款机器人拥有蛇身般的结构,通过应用不同的移动运算法则至该机器人的分段脊椎,如果运算法则能够成功地使机器人接近预计实现目标进行移动,他们便将该运算法则用于下一分段脊椎设计。如果不成功则放弃。
2 }1 o0 P9 Z. g& f5 x+ E
: V5 U( A" S: y公仔箱論壇在每个分段结构中,成功的运算法则还将随着分段结构的轻微变动而进行验证,当进行反复性的测试之后,机器人将“进化”形成成熟有效的运动模式。随着分段结构不断地增长,模拟系统中机器人的腿部运动从最初的滑行开始向步行演变。
, u' R( e. v8 E. ]$ U( ~1 B公仔箱論壇os.tvboxnow.com# w. ^% L2 ]- g/ B4 a4 l4 A
tvb now,tvbnow,bttvb+ q4 v7 o/ }/ D; Y1 o' F
邦加德说:“这种缓慢生长的机器人腿部能从机器人角度使运算法则作为‘控制器’去处理问题——先学动摆动身体,再实现身体平衡。同时,这也将适用更成熟的步态。”应用于现实版的机器人设计,起初它拥有一个简单的关节型脊柱和4个机器腿,之后用一个额外的支柱帮助四条机器腿像蜥蜴一样向外伸展,再逐渐进行收拢,最终这款机器人可以站立起来。邦加德称,该种模型显示出机器人能够真实地进化形成成熟有效的步态。/ M+ A& b. T! W2 R
" C! Y6 o- O) G2 x, W
* k5 U, ], d0 }+ y9 ]0 }# j. d
2 R2 n/ c& G4 W2、大狗机器人 os.tvboxnow.com/ j, P7 u9 n+ F- N) l* s
2、大狗机器人
( `/ \: V7 W( Xtvb now,tvbnow,bttvb公仔箱論壇/ |% i( G% U1 @- @! g5 }! P
; O; W6 K+ S+ [+ etvb now,tvbnow,bttvb无论是两腿、四腿还是多腿机器人,这些步行机器人要比轮式机器人或者非移动机器人看起来更像动物。它们可以更容易地溶入人类的生活,也看上去更加可爱,容易被人们所接受。机器人的腿部运动机制对于未来机器人的发展具有重要作用。2 N% H- f# m+ O: g/ F
. E* c. z5 | {9 H5 Oos.tvboxnow.com L1 Z6 W( v/ c1 h
邦加德说:“有腿机器人能够比那些轮式机器人更适应崎岖的地形。”这也是美国五角大楼为什么斥资数百万美元资助波斯顿动力公司研制“大狗机器人”的原因,这种四腿机器人像背负物体的骡子,能够携带136公斤(300磅)的物体行走于泥泞的雪地、冰面或者煤渣中。同时,即使在受到较大的推挤力作用下,它依然能够较稳地站立。$ E, j( h& n, B# b! ?& D: o
3 H& v( ^' s* mTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。
( \8 {) e$ r5 `# K' D& wtvb now,tvbnow,bttvb
) a8 P* A9 A9 y- y: T- r8 W8 h" _) Zos.tvboxnow.com3、“突击队员”机器人
' L4 D: k# p8 ]1 f w& u' A公仔箱論壇3、“突击队员机器人”
* Q9 C) R/ ? l2 v- A9 l/ Dos.tvboxnow.com
+ P' V# |; Q* @+ a0 Y/ }os.tvboxnow.com2010年7月,美国康奈尔大学最新研制一款机器人“突击队员(Ranger)”,能够11小时之内行走23公里,建立了一项非官方世界纪录。7月6日,机器人“突击队员”围绕着康奈尔大学巴顿体育馆的田径跑道行走了108.5圈,每圈约212米,这款机器人从启动到电池耗尽停止共走了7万步。整个过程仅是研究人员在附近进行遥控。据悉,之前的世界纪录是由波士顿动力公司“大狗”机器人创建的,共完成20.59公里行程。康奈尔大学理论和应用机械系教授安迪-鲁伊纳(Andy Ruina)带领几位工程系大学生共同完成这项研究。此前鲁伊纳实验室的学生们在2008年4月创建了一项机械人行走纪录,当时“突击队员”行走了9公里。之后波士顿动力公司的“机械大狗”才打破了这项纪录。公仔箱論壇0 X( s- u; [. g% S7 Y
7 X" j* t$ E$ \$ aos.tvboxnow.com这项机器人研究的目标之一是为了展示“突击队员”机器人的有效动能,不同于其它使用发动机控制移动的行走机器人,“突击队员”机器人使用重力和动力促进双腿向前行进,它表现得更具灵活力,在一定程度上可与人类行走相媲美。
4 {; B* Q/ Y! }, S0 ~! oos.tvboxnow.com公仔箱論壇$ q- M# E+ ]# [( O p' G! w- K
这款机器人看上去就像一个高锯木架,它的步态就像是一个拄着拐杖的人,它有4个支架腿,没有“膝盖”结构。鲁伊纳称,通过这项机器人行走实验,不仅有利于促进先进机器人的发展,还可帮助这些大学生更深刻地理解机器人行走的原理,这些原理和信息可应用于人类义肢研究和残疾肢体恢复,并有助提高人们的运动能力。TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。 l X0 |1 a' M- Q. `
& X9 ?5 v- G( c* v( {2 J. Vtvb now,tvbnow,bttvb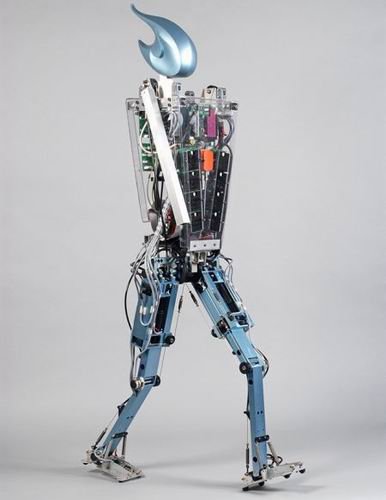
5 J9 \$ t% t+ M! Y" _# w公仔箱論壇
9 o+ f' S J( v7 [2 [/ V( [8 T4、火焰机器人 % }$ E. D! c8 ]% N) j0 R1 y5 n
4、“火焰机器人”TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。0 {9 W# W( Y3 h; C: K$ v" W4 t
/ @2 p6 ?. n% I, `tvb now,tvbnow,bttvbtvb now,tvbnow,bttvb4 F+ c3 Z# i9 j
步行机器人之所以吸引人们并不是它们的实用性,而是因为它们的新奇性,毕竟这样的机器人设计难度较大。自上世纪90年代,科学家们就一直关注一个领域——“被动动力学”,航空工程师泰德-麦克吉尔(Tad McGeer)研制了一款非常像人类的两腿机器人——“火焰机器人”,这款机器人无需任何发动机,便能自如地在下坡路上行走。) v! R9 x* C+ u
% r& X: x8 A9 H+ mTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。# h: A5 N% ?& ~& |/ p1 b! S
据悉,火焰机器人的臀部、膝盖和踝骨采用了弹性结构,也就是每个发动机和相应的关节之间都有一个弹簧,而不是发动机与关节直接相连接。os.tvboxnow.com3 T) Z) U7 u) O4 z
TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。7 ]$ m A- J9 B3 g
! M7 W& ]8 B- R0 ~ R# N) G& Y公仔箱論壇
. j) |% _5 n+ y0 r" B5 n! |* sTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。; A* [" s6 e; t7 i: X# B& S
5、六足机器人 5、六足机器人os.tvboxnow.com! B8 n6 N/ E1 B7 W
, e" V1 _8 z* ~& [6 a并不是每个步行机器人都拥有两条腿或者四条腿,六条腿的机器昆虫对于机器人DIY迷而言却更实现,因为这种结构看上去更加稳定。但是由于六条腿是成对地运动,因此必须具备3个伺服系统来控制6条腿。
! _& x5 a, T& S' X# C9 }8 d) v$ Btvb now,tvbnow,bttvb
% |) G" p1 p' Q/ Wtvb now,tvbnow,bttvb乔什-朱利奥(Jose Julio)是六腿机器人的制造者,他使用一个Arduino控制板、3个伺服系统和1个红外传感器构建了这款机器人。目前,这款六足机器人可通过手工模式、辅助模式和全自动模式运行。
1 E) c8 j9 M- z# { ]1 O4 q* }os.tvboxnow.com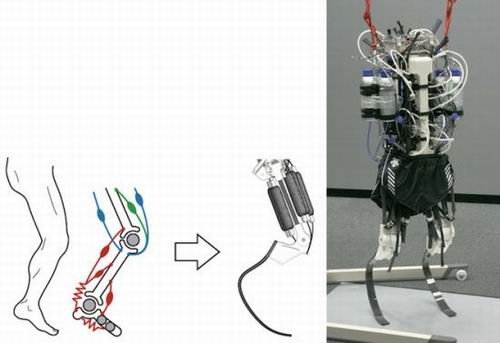 tvb now,tvbnow,bttvb' u6 Y1 g; M8 `& ? tvb now,tvbnow,bttvb' u6 Y1 g; M8 `& ?
. ^- f) h: m" R' l8 Z, Q6、“运动员机器人”
$ [% [# S$ ?6 T2 f& L oTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。6、“运动员机器人”$ b& k! N2 L; ?* r4 l5 K& P8 v
TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。" i% P7 M [8 h* u+ C& _9 r% w3 t
" Y4 f8 |4 o6 K4 [; K, PTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。日本东京大学科学家Ryuma Niiyama研制的一款两足机器人,能够完成跳跃、奔跑等动作,同时自身可很好地平衡。这款机器人又被称为“运动员机器人”。tvb now,tvbnow,bttvb2 ^% h' w8 Q; c/ a) b R2 X
4 d+ N) D9 J3 e1 ^7 fTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。Ryuma Niiyama采用不同的方法建造了运动员机器人的腿部,这款机器人的踝骨并不是关节结构,而是采用一种反向曲面弹簧,这种结构更适合于奔跑。
! M' ~1 b$ W, Q公仔箱論壇 tvb now,tvbnow,bttvb0 }4 _! J* m$ C3 ~0 a/ z& f
# @. K: t- ]9 s+ [. b, b3 j公仔箱論壇
2 K' m. | j2 xTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。7、DNA机器人 7、DNA机器人
! O( N; A# y: r" I1 s( |TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。公仔箱論壇/ I' H- G& L N5 Q+ N/ Z F8 }
os.tvboxnow.com- n s& O4 J8 B8 N3 L1 N7 n3 g0 Z
机器人并不是为了具备行走功能而制造得体形更大,2004年,美国纽约大学科学家纳德里安-希曼(Nadrian Seeman)建造了一款DNA机器人,他是使用脱氧核糖核酸(DNA)分子制造的。这款机器人利用DNA分子链可在两个特定的位置往返移动,这两个立足点也是由脱氧核糖核酸制成。希曼称,未来纳米技术亦可应用这项技术。tvb now,tvbnow,bttvb" z/ w8 q* I! y N8 U4 t
os.tvboxnow.com* S% \! [' D' g+ A, u! C6 d' V
3 Q0 e7 S8 P) M9 Z8 L/ ?

' ^0 H- h5 {3 z* X* f8 } mos.tvboxnow.com' ^3 G; R! W4 @ X$ ^) K n$ `
8、Chumby机器人 8、Chumby机器人5 ?. ?6 `2 e) f1 N7 E9 x( M
, b& P! ]( Z5 x0 H& C7 f9 J
Chumby机器人是一个基于Linux操作系统的计算机系统,可满足各种DIY计划。当将Chumby机器人装配上两条腿,这个计算机则变得了一款简单的步行机器人。这仅是一个简单的设计方案,并非成熟可行的模型,但其中显现了该机器人的机动性和简易构造性。$ t% p6 @ k6 g- s
& J( z! ]4 i# eTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。公仔箱論壇! u! O" I B+ O% i% u! |( G& f

2 ^$ J4 H/ p1 P# Y0 a* I- X
' g1 e: g& B& ?- y5 H( G+ b9、可下蹲的两足机器人 9、可下蹲的两足机器人TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。( _! F( S- E: I
2 @( e. x+ M! R5 d. Y; d& y/ M$ xtvb now,tvbnow,bttvb
4 i" B( u5 |( e, C肯-麦克穆兰(Ken McMullan)希望建造一款成本低廉的两足机器人,因此,他使用聚氯乙烯(PVC)板建造了一个框架结构,再将多个伺服系统、1个廉价CPU和1个廉价电源组装起来,仅在40个小时之内,麦克穆兰花费了120美元便制成了一个两足机器人。同时,2008年,麦克穆兰还编程开发一些指令,演示的新款机器人能够完成下蹲以及一些单腿动作。
% d0 X! E t6 FTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。 os.tvboxnow.com1 v4 C; ~& a, C7 E0 W
 TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。/ h) x) M8 g$ [ o1 J TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。/ h) x) M8 g$ [ o1 J
10、150美元DIY步行机器人 10、150美元DIY步行机器人公仔箱論壇2 k9 ^; i/ Y& |8 n) O
6 }8 f' q& O0 y/ q, g
公仔箱論壇0 {4 N4 d% K |& s0 _/ P2 n0 C
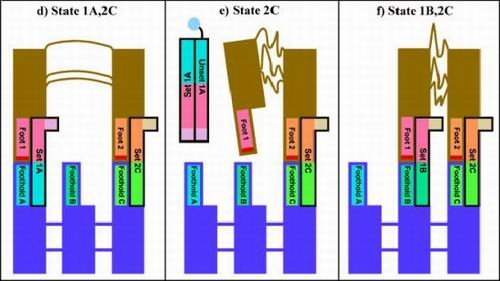
建造一个多足机器人将面临着多项挑战,这并不仅仅是赋予机器人一种本体感受。这种感觉就如同人类身处太空环境中身体的感受,对于机器人而言,意味着它不能仅接受一个指令至伺服系统,或者移动腿部至精确的位置。机器人需要依据当前的位置变化而作为即时动态反应,并保持身体移动状态下的平衡。
* }" x7 d& o3 K公仔箱論壇TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。% ?& Z# g* Q3 P) I5 `5 s
& _) p: B9 h: Y9 N) D }如图,这款DIY机器人成本仅有150美元,但事实上设计师却花费了200个小时来建造,使这款机器人行走时产生一些“感觉”。os.tvboxnow.com5 O1 \, H! n3 P: o
" v8 c' ?- z/ v7 z. }公仔箱論壇 os.tvboxnow.com6 N! d, Q, D$ n6 Y4 H. l. @& [' p8 z os.tvboxnow.com6 N! d, Q, D$ n6 Y4 H. l. @& [' p8 z
7 \4 j: {0 ~( c5 C
11、简易步行机器人通过套装组件即可实现
5 y5 n+ W# U( k4 b# T8 WTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。11、简易步行机器人通过套装组件即可实现TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。# A9 j* z+ e% c: l; W0 g7 e
tvb now,tvbnow,bttvb5 w; ~, S1 I1 ?: w
2 y* i2 h; A1 G9 v/ q& FTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。人们希望建造一个步行机器人,但并没有时间机械加工它们的组件、编写软件和程序。原来这些组件都可以买到,Robokitsworld.com网站提供两足机器人套装组件,整套只售123美元。
0 k$ X! H1 v( r( ? t* d2 Z3 A1 VTVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。 & X" ?) w9 ~8 X* r8 ~5 h
: z8 j/ H+ n" n9 c+ J$ \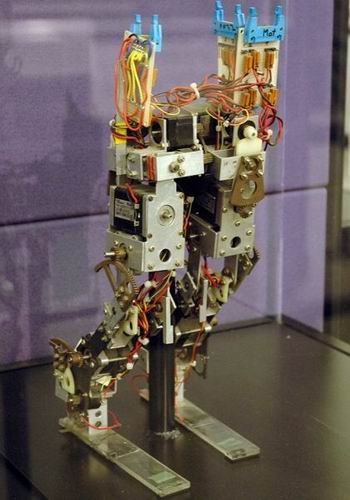
/ ^' R+ ~8 `3 o- q- J8 m# [TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。1 U5 T9 E. G6 D3 z6 t/ z
12、具有膝盖关节的机器人腿 12、具有膝盖关节的机器人腿- f6 c8 M0 t1 D
: G8 n1 w# i X' r2 l3 Q3 h, k. K
TVBNOW 含有熱門話題,最新最快電視,軟體,遊戲,電影,動漫及日常生活及興趣交流等資訊。- I% j4 @! z$ c7 p* p/ `
如图所示,这对机器人腿是上世纪80年代日本东京大学科学家Isao Shimoyama和 Hirofumi Miura建造的,不同于其前代产品Biper-3,这种机器人腿具有膝盖关节,它的较大扁平足部可避免它翻倒在地。
" X6 O* ?( o7 z" [tvb now,tvbnow,bttvb
0 j, h B. C; `/ I/ Z; `tvb now,tvbnow,bttvb
/ C% P4 W: ]. ^5 y4 f$ [* a tvb now,tvbnow,bttvb1 c) J' G) h* }9 C* r+ K
 os.tvboxnow.com+ z. g1 c; L r& g os.tvboxnow.com+ z. g1 c; L r& g
( p6 `+ t+ ^% U公仔箱論壇13、阿西莫机器人 13、阿西莫机器人
" h& n% E0 r3 I( l3 F公仔箱論壇公仔箱論壇8 J# S: I3 m) y8 e! J% `9 k
l( t5 l# C% @, Pos.tvboxnow.com或许近年最著名的两足机器人就是日本本田公司研制的“阿西莫”,它被称为世界上最先进的仿真机器人,其主要作用是协助人类工作,其最大特点在于机械移动性,其步行系统可使它能爬楼梯、行走于不平坦的地面,甚至在推力作用下也不会跌倒。公仔箱論壇/ s3 W4 C) {5 o0 b+ d+ @8 n
|





 發表於 2011-2-14 02:16 PM
|
發表於 2011-2-14 02:16 PM
|